Устройство и принцип действия
Суть конструкции электронного привода акселератора состоит в том, что перемещение дроссельной заслонки осуществляется не как обычно, с помощью троса и тяг, непосредственно связанных с педалью акселератора в салоне, а электродвигателем, работающим под управлением электроники.
При этом отсутствует традиционная механическая связь между педалью акселератора и дроссельной заслонкой.
Это означает, что изменение водителем положения педали акселератора преобразуется в электрический сигнал и передается в блок управления, который, в свою очередь, осуществляет управление перемещением дроссельной заслонки.
Такая организация взаимодействия позволяет блоку управления изменять положение дроссельной заслонки и влиять на величину крутящего момента двигателя даже в том случае, когда водитель не меняет положения педали акселератора.
Сравним старый и новый методы управления.
Механическое управление перемещением дроссельной заслонки
Водитель непосредственно контролирует положение педали акселератора. Блок управления двигателем при этом не может повлиять на положение дроссельной заслонки. Поэтому, чтобы изменить крутящий момент двигателя, приходится воздействовать на другие параметры режима двигателя, например, на момент зажигания и впрыска топлива, что как правило, не всегда эффективно и корректно. Только когда водитель не воздействует на педаль акселератора, то есть в режиме холостого хода и при работе круиз-контроля, осуществляется электронное управление работой двигателя.
Электронное управление перемещением дроссельной заслонки
При этом методе перемещение дроссельной заслонки всегда происходит под управлением электроники. Водитель, в соответствии с намерениями по изменению оборотов двигателя, воздействует на педаль акселератора. Положение педали отслеживается датчиками, и сигналы от них передаются блоку управления работой двигателя. От него электродвигатель получает команду на вполне определенное перемещение дроссельной заслонки в соответствии с изменением положения педали акселератора. В тех случаях, когда есть необходимость изменения крутящего момента двигателя по причинам обеспечения безопасности движения или экономии топлива, блок управления двигателем может изменить положение дроссельной заслонки самостоятельно, без изменения водителем положения педали акселератора.
Таким образом, новое качество управления сводится к тому, что блок управления регулирует положение дроссельной заслонки в соответствии с пожеланиями водителя, необходимостью обеспечения безопасности движения, снижения расхода топлива и экологическими требованиями. Электронное управление реализуется изменением положения дроссельной заслонки, давления наддува, момента впрыска топлива и момента зажигания, а также применением технологии отключения цилиндров.
Достижение оптимального крутящего момента
Блок управления двигателем обрабатывает внешние воздействия и внутренние требования в отношении величины крутящего момента двигателя и, исходя из алгоритма встроенной программы, рассчитывает необходимую величину крутящего момента. Данный метод намного точнее и эффективнее, чем механический.
Внешние воздействия возникают от:
- действий водителя;
- автоматической коробки передач (в момент переключения);
- климатической установки (включение и выключение компрессора);
- нагрузки генератора;
- тормозной системы;
- круиз-контроля (GRA).
Внутренние требования возникают от:
- условий пуска двигателя;
- подогрева катализатора;
- регулирования принудительного холостого хода(MSR);
- ограничения мощности;
- ограничения частоты вращения двигателя;
- регулирования состава смеси по содержанию кислорода в отработавших газах;
- со стороны системы контроля тяги (ASR).
После того как оптимальный крутящий момент двигателя рассчитан, он сравнивается с фактическим крутящим моментом, который определяется исходя из частоты вращения двигателя, данных о нагрузке двигателя и момента зажигания. Если при сравнении величины не совпадают, блок управления двигателя определяет направление и величину необходимого комплексного воздействия на системы двигателя с целью достижения совпадения фактического крутящего момента с оптимальным.
Для этого изменяются параметры, которые относительно долго влияют на процесс изменения крутящего момента двигателя. Это угол открытия дроссельной заслонки и давление наддува в двигателях с турбонаддувом. Кроме этого оказывается влияние на характеристики, которые относительно быстро изменяют величину крутящего момента. Это момент зажигания, момент впрыска топлива и отключение цилиндра(ов).
В качестве примера практической реализации электронного привода акселератора рассмотрим блок-схему подобной системы автомобилей AUDI.
Блок-схема системы электронного привода дроссельной заслонки автомобилей AUDI
Блок-схема системы электронного привода дроссельной заслонки приведена на рис. 1.
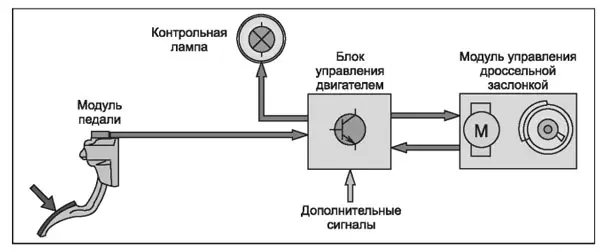
Рис. 1
В состав системы входят:
- модуль педали акселератора;
- блок управления двигателем;
- модуль управления дроссельной заслонки;
- контрольная лампа электронного привода дроссельной заслонки.
Модуль педали акселератора
Этот модуль с помощью датчиков непрерывно определяет положение педали акселератора и передает соответствующую информацию в аналоговом виде блоку управления двигателя.
Он состоит из педали акселератора, датчика 1 положения педали акселератора G79 и датчика 2 положения педали акселератора G185.
Для повышения надежности модуля используются два одинаковых датчика, эта реализация заимствована из специализированных систем и не является чем-то особенно новым.
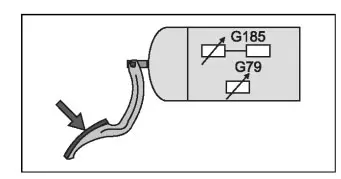
Рис. 2
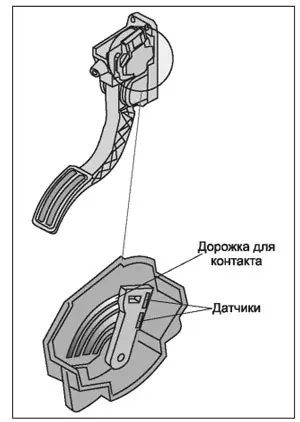
Рис. 3
Получая информацию от обоих датчиков положения педали акселератора, блок управления двигателем определяет положение педали в каждый момент времени. Датчики конструктивно представляют собой потенциометры со скользящим контактом, укрепленным на общем валу (рис. 3). При каждом изменении положения педали изменяется сопротивление датчиков и, соответственно, напряжение, которое передается на блок управления двигателя.
Каждый датчик положения педали акселератора для повышения надежности имеет свой провод питания напряжением 5 В (красный), свой провод соединения с "массой" (коричневый) и свой выходной сигнал (зеленый провод). Датчик G185 нагружен дополнительным сопротивлением (рис. 4). Благодаря этому получают две различные характеристики аналоговых сигналов. В блоке управления сигналы датчиков анализируются в процентах. Это значит, что 100% соответствует 5 В в цепи без нагрузочного сопротивления.
По граничным значениям напряжения опознаются режимы "кик-дауна" и холостого хода. Выключатель режима холостого хода расположен в модуле управления дроссельной заслонки.
Рассмотрим работу блока при возникновении неисправностей.
Работа системы привода дроссельной заслонки при возникновении неисправностей
Отсутствует сигнал от одного из датчиков
- Информация о сбое заносится в регистратор неисправностей, зажигается контрольная лампа электронного привода акселератора.
- Двигатель принудительно переходит в режим холостого хода.
В течение определенного контрольного срока считывается информация от второго датчика, если она опознается, система возвращается в режим штатного управления движением автомобиля.
- При полном нажатии на педаль акселератора частота вращения двигателя увеличивается, но медленнее, чем обычно.
- Дополнительно происходит опознавание режима холостого хода исходя из анализа положения педали посредством выключателя сигналов торможения F или выключателя по положению тормозной педали F47.
- В режиме принудительного холостого хода комфортные функции, например круиз-контроль или регулирование двигателем, отключаются.
Отсутствует сигнал от обоих датчиков
- Информация о сбое заносится в регистратор неисправностей, зажигается контрольная лампа электронного привода акселератора.
- Двигатель работает только на повышенных оборотах холостого хода (максимально 1500 об/мин) и не реагирует на педаль акселератора.
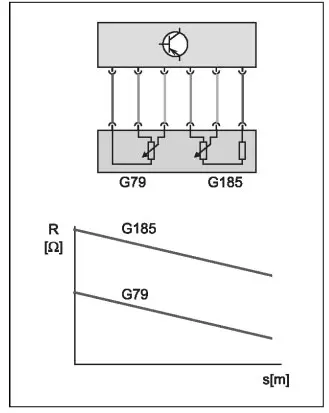
Рис. 4
Возможна ситуация, когда одновременный выход из строя двух датчиков не будет опознан системой управления. При этом контрольная лампа не загорится, а двигатель будет работать на повышенных оборотах холостого хода и не будет реагировать на педаль акселератора.
Блок управления двигателем
Этот блок(см.рис.5 и 6)анализирует, контролирует и управляет системой электронного привода дроссельной заслонки исходя из внешних воздействий и внутренних требований к системе. Он состоит из функционального и контрольного модулей.
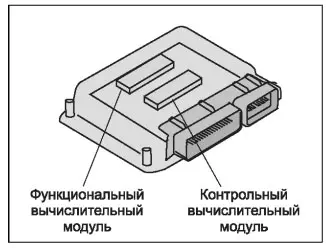
Рис. 5
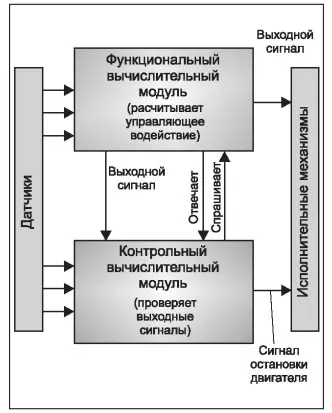
Рис. 6
Функциональный модуль получает сигналы от датчиков, обрабатывает их и управляет исполнительными устройствами. Дополнительно осуществляется взаимная проверка обоих модулей, при этом используется функция "вопрос-ответ". Если при этом произошел сбой в работе, оба вычислительных модуля могут независимо друг от друга, посредством воздействия на модуль управления дроссельной заслонкой (зажигание и впрыск топлива), остановить двигатель.